

by Ioannis Mandralis/Communications Engineering
カリフォルニア工科大学のエンジニアチームが、飛行しながら変形して地上を走行する車両になる機能を備えた「空中変形モルフォボット((Aerially Transforming Morphobot:ATMO)」を発表しました。
ATMO: an aerially transforming morphobot for dynamic ground-aerial transition | Communications Engineering
https://www.nature.com/articles/s44172-025-00413-6
Mid-Air Transformation Helps Flying, Rolling Robot to Transition Smoothly – www.caltech.edu
https://www.caltech.edu/about/news/mid-air-transformation-helps-flying-rolling-robot-to-transition-smoothly
ATMOが離着陸する様子は、以下から見ることができます。
ATMOロボットは空中で変形し地上移動が可能 – YouTube
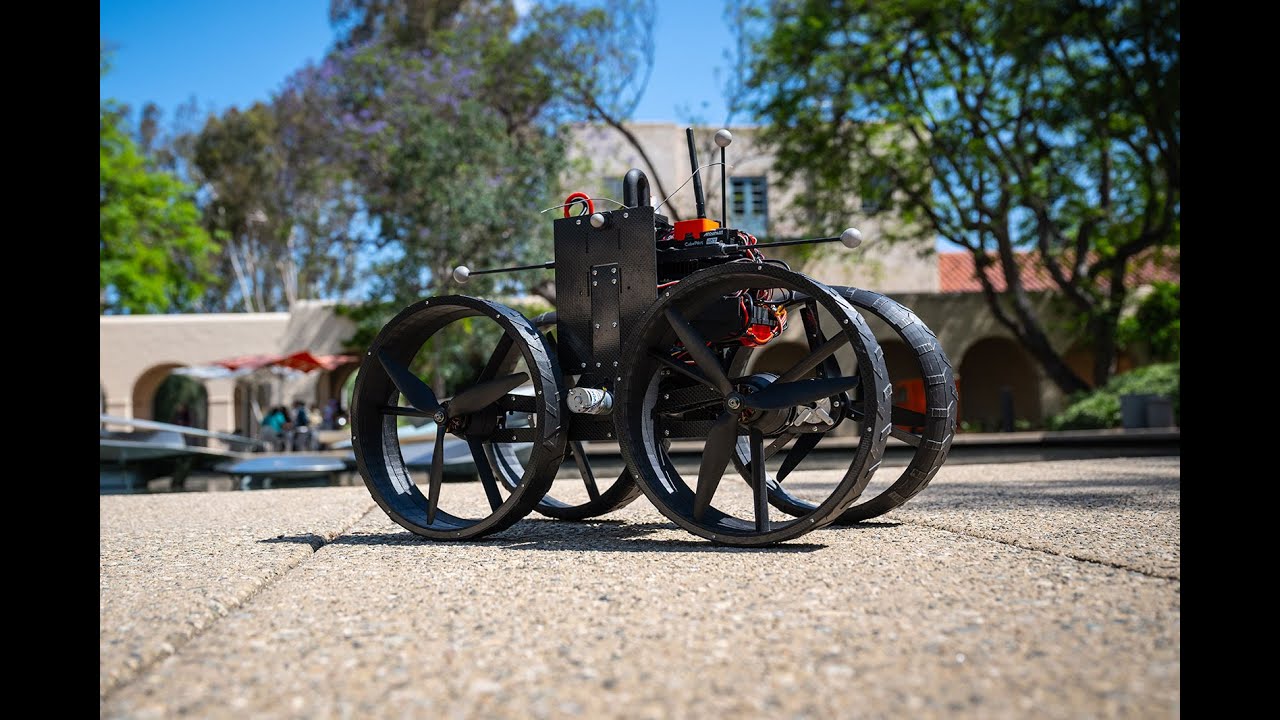
ATMOは飛行形態から車両へ、車両から飛行形態へとスムーズに移行することができます。

by Ioannis Mandralis/Communications Engineering
ATMOの前身となったのは、動物が様々な移動方法を実現するために様々な体の使い方をすることから着想を得てカリフォルニア工科大学が開発した「マルチモーダルモビリティ・モルフォボット(Multi-Modal Mobility Morphobot:M4)」です。
動物に着想を得たトランスフォーマードローンが登場、プロペラになる車輪で歩行・走行・飛行が可能 – GIGAZINE

ATMOがM4と最も大きく違う点は、着陸してからでないと飛行形態から車両に移行できなかったM4とは異なり、空中で変形できるようになった点です。これにより、ATMOは起伏の多い地形が苦手だったM4の弱点を克服し、斜面に緊急着陸したり、飛行スピードを維持したまま車両に変形したりすることが可能になりました。
カリフォルニア工科大学の教授で論文の共著者でもあるモルテザ・ガリブ氏は「鳥が着陸してから走るのを見ると、簡単なことのように思えますが、航空宇宙産業はこの課題におそらく50年以上もの歳月をかけて取り組んできました」と話します。
特に難しかったのが、4つのローターが生み出す複雑なジェット気流を理解することです。機体の制御アルゴリズムを開発するため、研究チームはATMOをロボットアームに取り付けて推力の変化を調べる「ロードセル試験」と呼ばれる手法を使用したり、スモークとレーザーを使った可視化実験を行ったりして、変形に伴う空気力学的なメカニズムを調べました。

by Ioannis Mandralis/Communications Engineering
また、姿勢制御のアクチュエーターを単一のモーフィング機構に置き換えることで、アクチュエーターの数を12個から1個に削減するのに成功し、システム全体が簡素化されて、故障箇所も減りました。

論文の筆頭著者であるイオアニス・マンドラリス氏は、「制御アルゴリズムこそが、この論文における最大のイノベーションです。ATMOのクアッドローターでは、スラスターの配置と飛行方法に応じた特別な制御装置が使われています。これには、これまで研究されていなかった動的システムが導入されており、ロボットが変形を始めるとすぐに異なる動的カップリング、つまり相互作用する異なる力が生じます。そして、制御システムはこれらすべてに迅速に対応できなければなりません」と話しました。
ATMOをより機敏で堅固なロボットにした今回の研究の成果は、商用配送システムやロボット探査などでの応用が期待されています。
ガリブ氏(左)とマンドラリス氏(右)。

by Lance Hayashida/Caltech
この記事のタイトルとURLをコピーする
ソース元はコチラ
{kind=link}
この記事は役に立ちましたか?
もし参考になりましたら、下記のボタンで教えてください。