
二足歩行でさまざまな動作を行うヒューマノイドロボットにとって、倒れた姿勢から立ち上がる能力は非常に重要です。新たに中国と香港の研究チームが、ヒューマノイドロボットが最初の姿勢や環境に関係なく素早く立ち上がるためのAIフレームワーク「HoST(Humanoid Standing-up Control)」を開発し、実際にHoSTを搭載したヒューマノイドロボットがあらゆるシチュエーションで立ち上がる動画を公開しました。
[2502.08378] Learning Humanoid Standing-up Control across Diverse Postures
https://arxiv.org/abs/2502.08378
Learning Humanoid Standing-up Control across Diverse Postures
https://taohuang13.github.io/humanoid-standingup.github.io/
Watch this humanlike robot ‘rise from the dead’ with creepy speed and stability | Live Science
https://www.livescience.com/technology/robotics/watch-this-humanlike-robot-rise-from-the-dead-with-creepy-speed-and-stability
ヒューマノイドロボットは主に人間と同じ二足歩行で移動やさまざまな動作をこなすため、倒れた状態や座った姿勢から立ち上がる動作をうまく制御する必要があります。しかし、既存のアプローチはハードウェアの制約を見落としていたり、事前に定義された特定の環境のみで動作するものだったりと、現実世界のシチュエーションには適していないとのこと。
そこで上海交通大学や香港大学などの研究チームは、立ち上がり制御をゼロから学習する強化学習フレームワークの「HoST」を開発しました。研究チームはHoSTの立ち上がり制御の学習において、報酬関数を4つのグループに分類して個別の最適化を行い、動作の滑らかさを保ったり不規則な動きを防いだりする制限を設けたとのこと。
また、研究チームは最初にNVIDIAが開発した物理シミュレーション環境の「Isaac Gym simulator」を使用したトレーニングを行い、その後で中国のロボット開発企業・UnitreeのヒューマノイドロボットであるUnitree G1にデプロイし、実世界の環境でのテストを実施しました。テストの様子は、以下の動画で確認できます。
HoST: Learning Humanoid Standing-up Control across Diverse Postures – YouTube

ウッドデッキの上で寝転がるヒューマノイドロボット。

まるで寝ているところを起こされた人間のように、ガバッと身を起こします。両膝を曲げて両手を後ろにつき、今すぐにでも起きられるような体勢。

そのまますくっと立ち上がりました。一瞬だけよろけたように見えたものの、細かな動きの後で安定した立ち姿になりました。

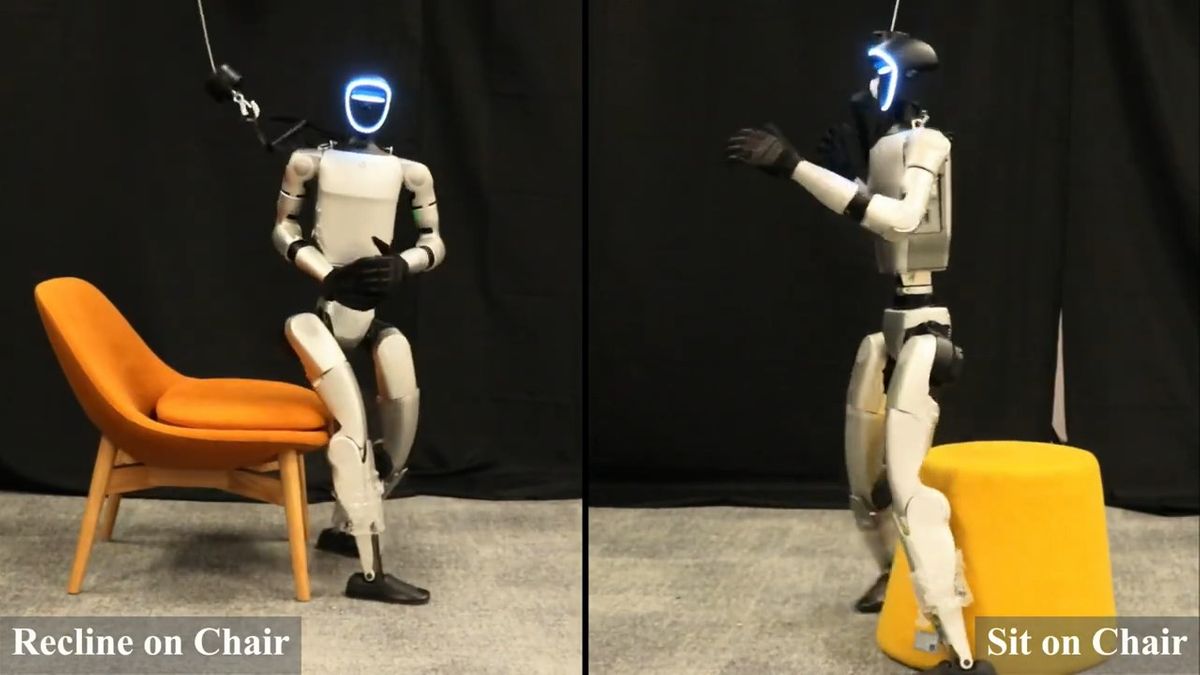
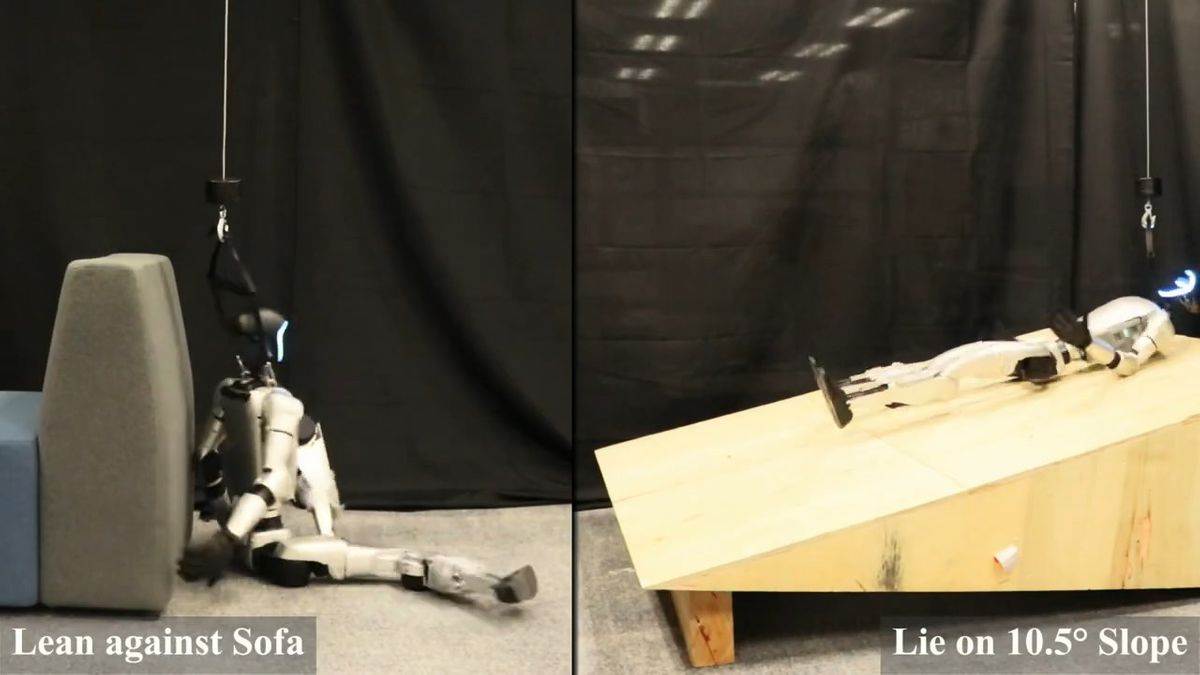
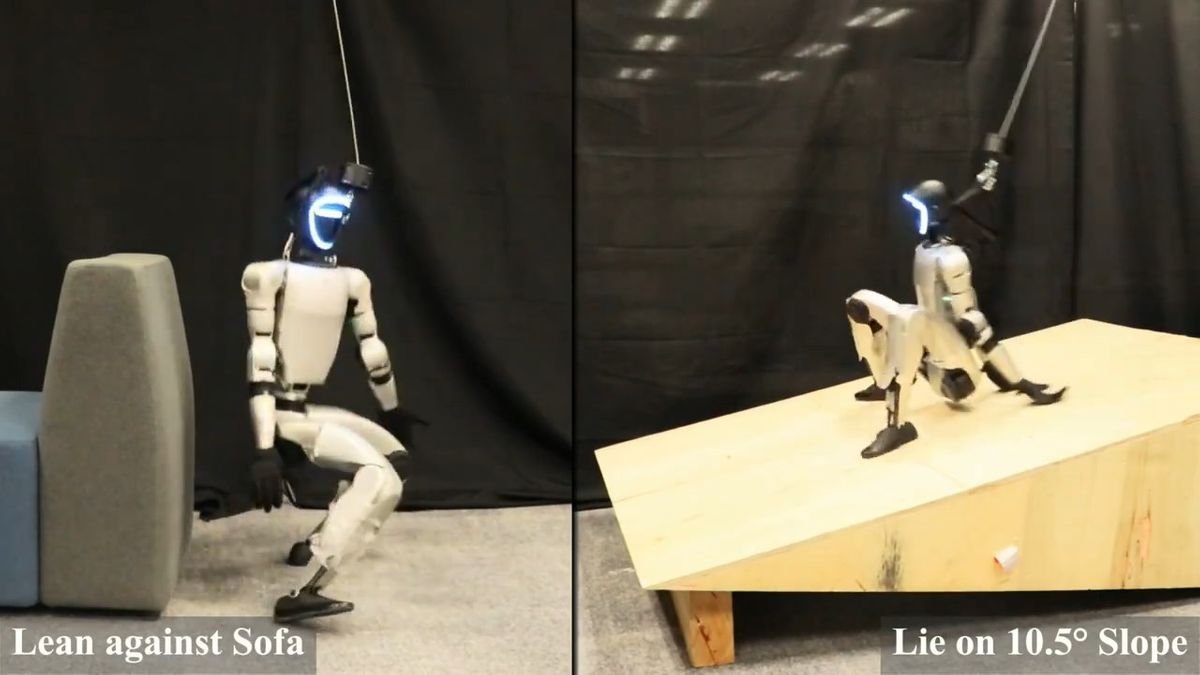
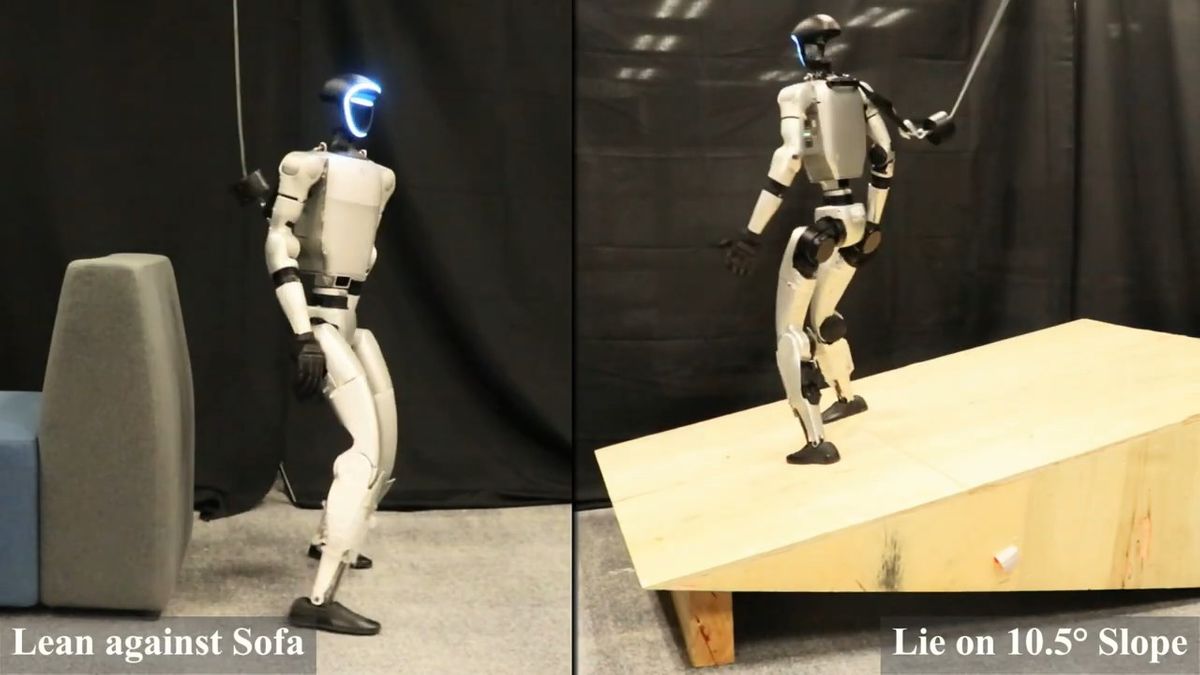
HoSTが導入されたヒューマノイドロボットは、寝ている状態だけでなくさまざまな姿勢から立ち上がることが可能。左が膝から下を段差から降ろした寝姿で、右が上半身を壁にもたせかけた姿勢です。

それぞれの姿勢から自然な動きで立ち上がりました。ロボットならではの特殊な動きという感じではなく、人間でも同じようにするであろう動きです。
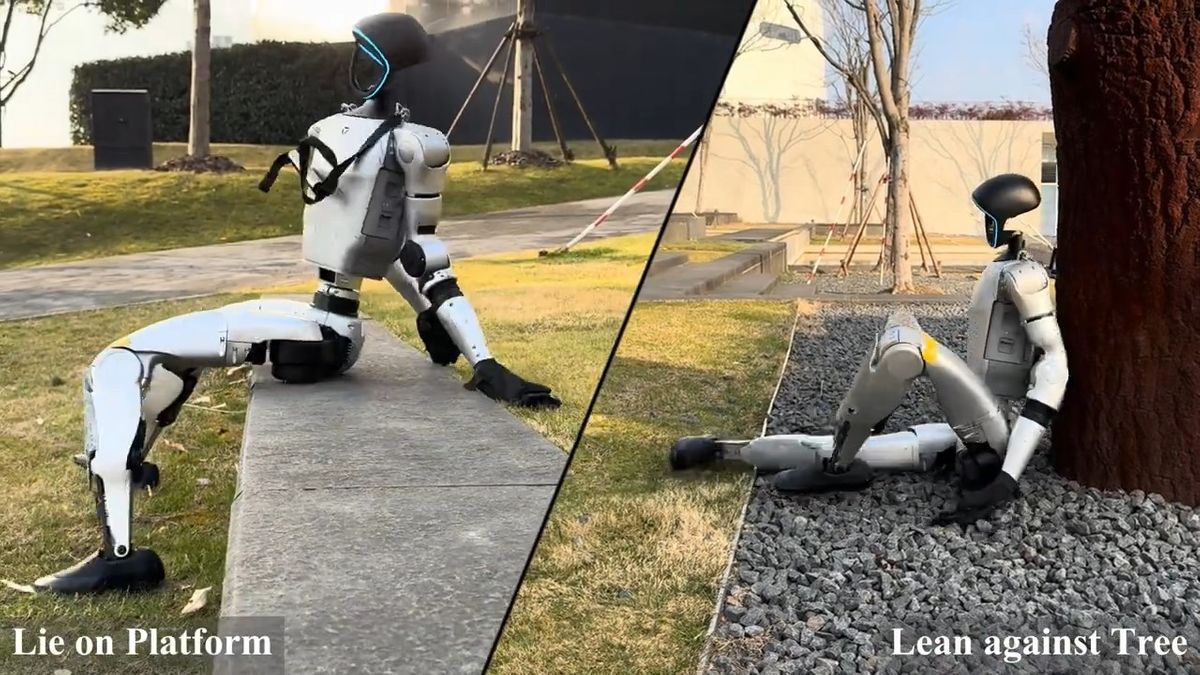

研究チームは他にも、砂利の上や芝生の上などさまざまなシチュエーションでテストしています。



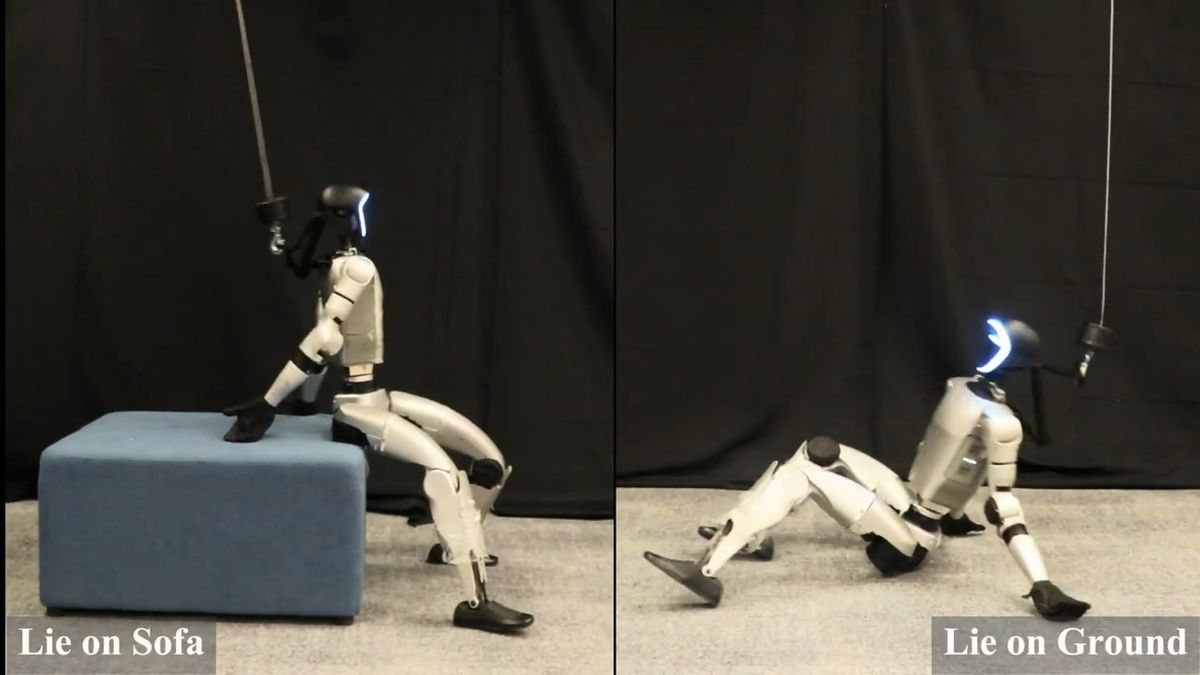
室内環境でも同様のテストが行われました。
中には「10.5度のスロープの上」(右)という特殊なシチュエーションもありましたが、HoST搭載のヒューマノイドロボットは難なく立ち上がることに成功。
さまざまな負荷をかけたシチュエーションでもテストが行われました。以下は6kgのリュックサックを持った状態。

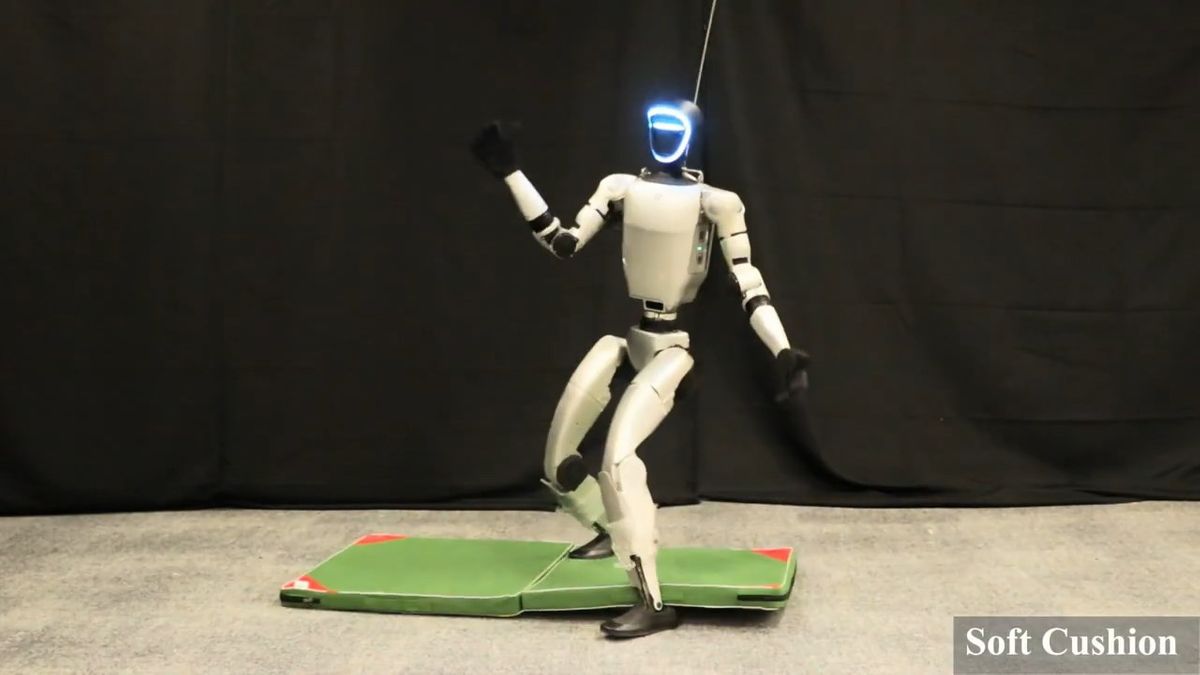
ソフトクッションの上でも立ち上がることができました。
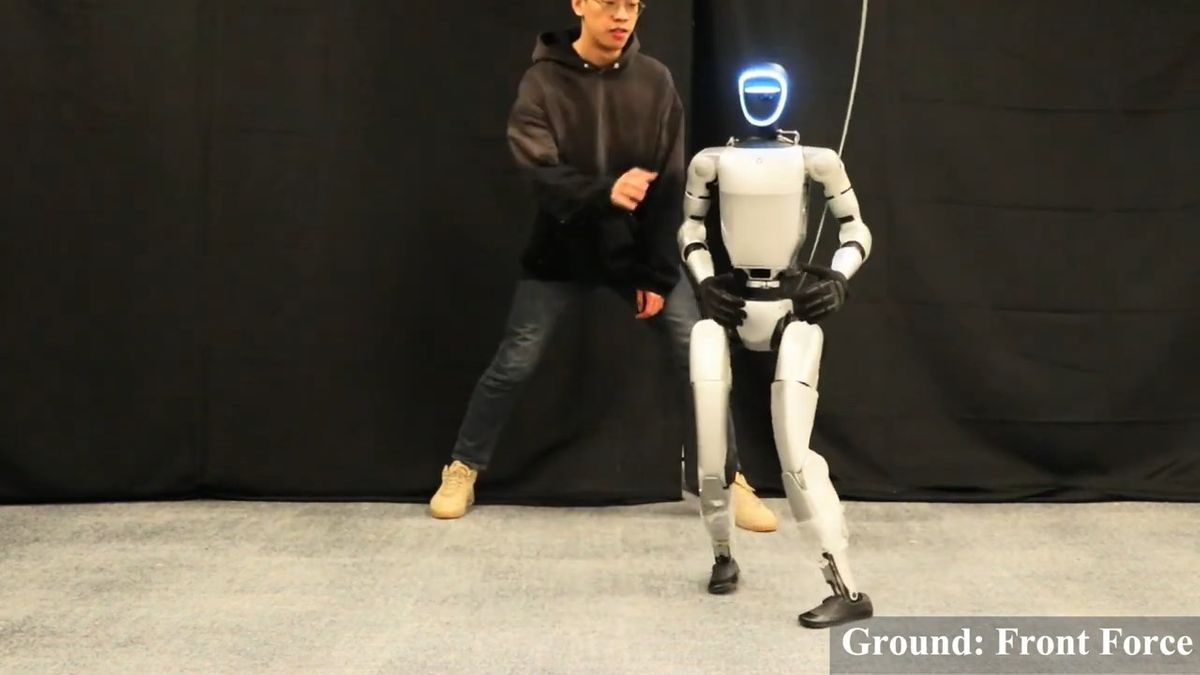
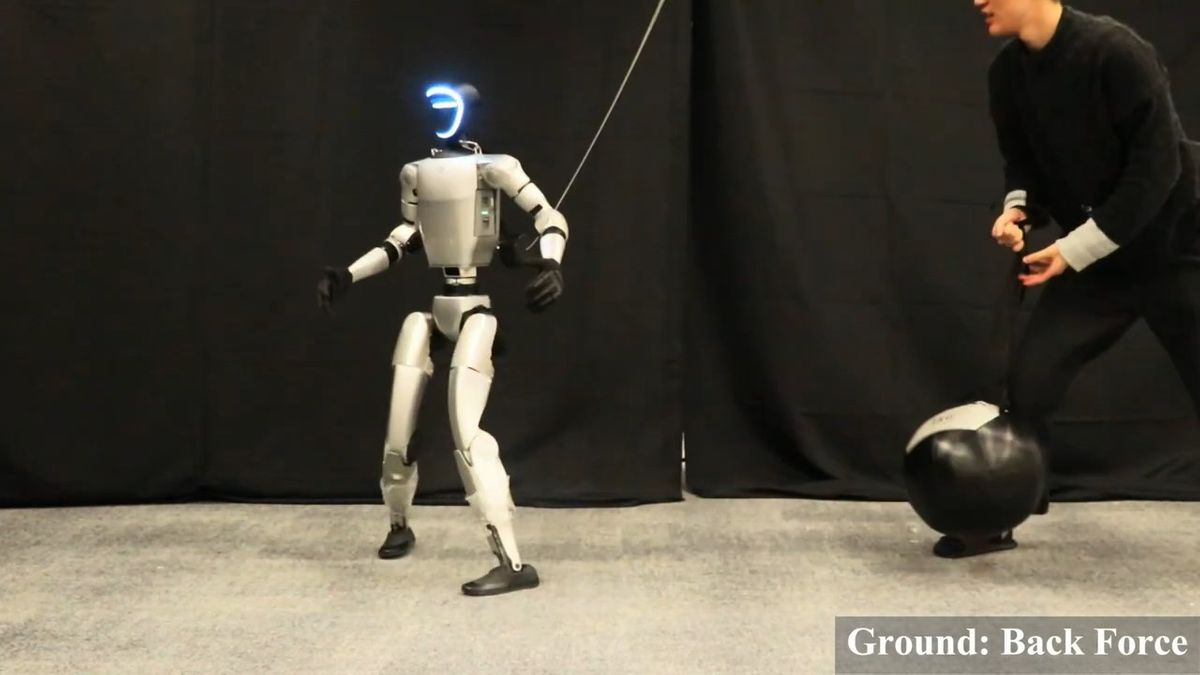
また、立ち上がった時に手で押すなど、外部から力が加えられたパターンでもヒューマノイドロボットは無事に立ち上がりました。

背後から物をぶつけられても大丈夫。

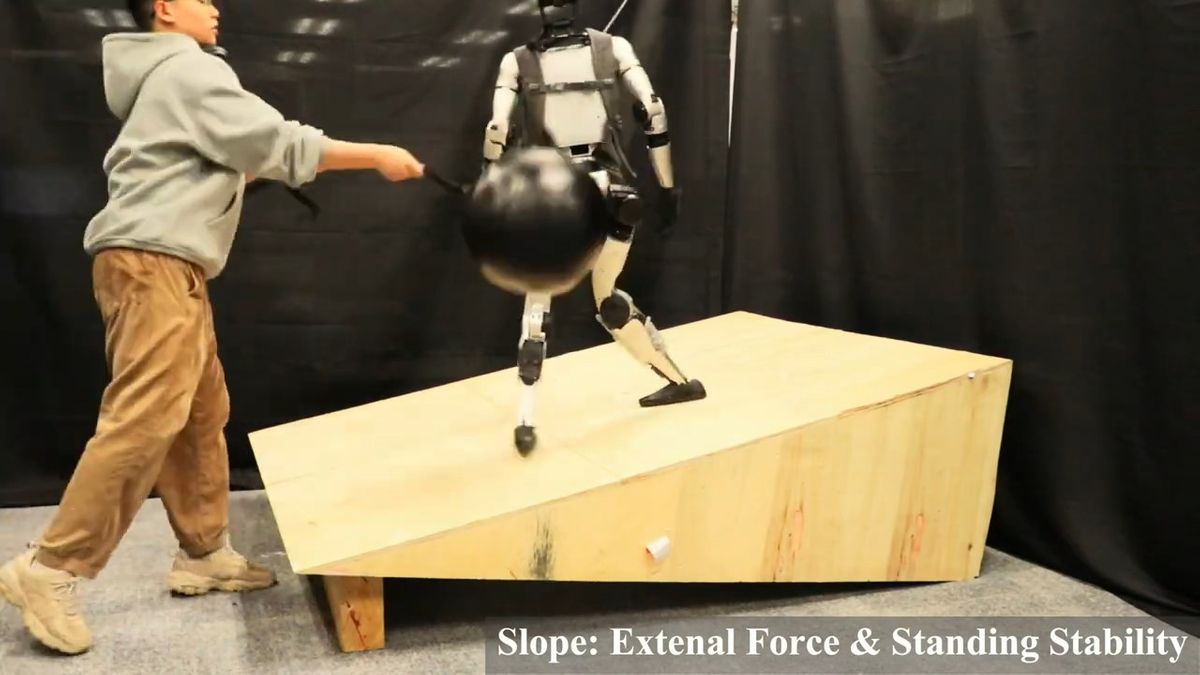
スロープの上で荷物を持ち、さらに立ち上がった時に力を加えられるというシチュエーションでも、立ち上がることに成功。
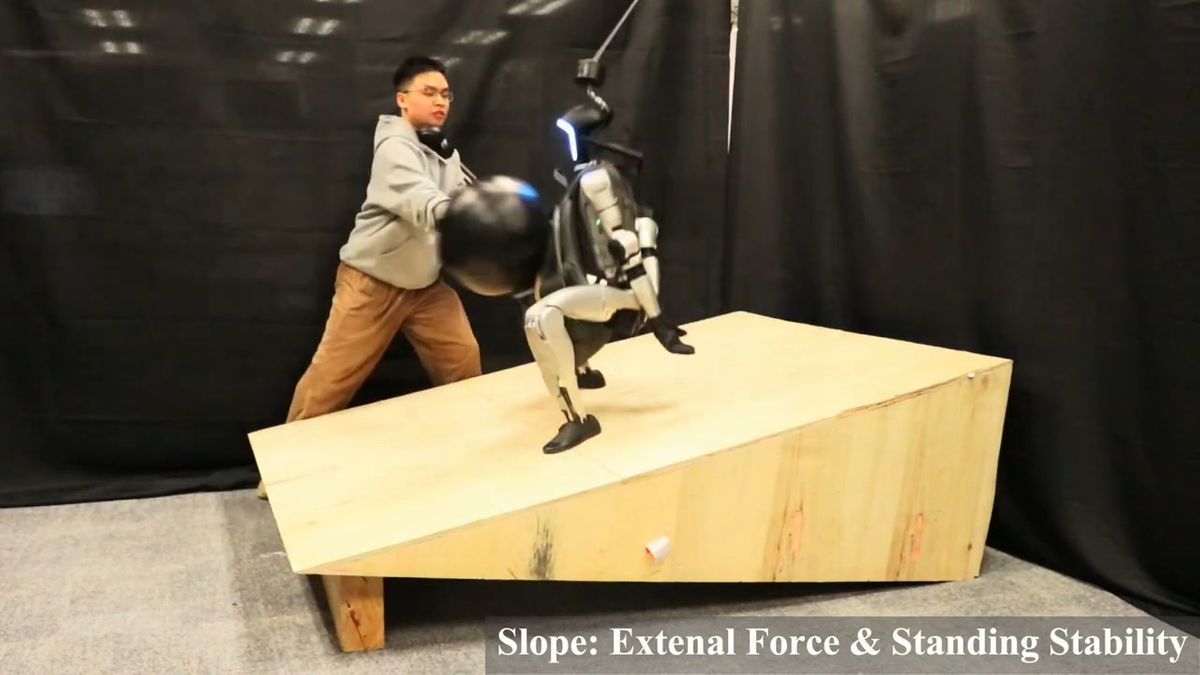

その後も蹴られたり物をぶつけられたりし続けましたが、やはり立ったままの姿勢を維持しました。

以下は起き上がろうとした直後に蹴り、尻もちを着かせるテスト。


また立ち上がろうとしたものの、バランスが崩れており、再び尻もちを着いてしまいます。この動きはまるで人間のようです。

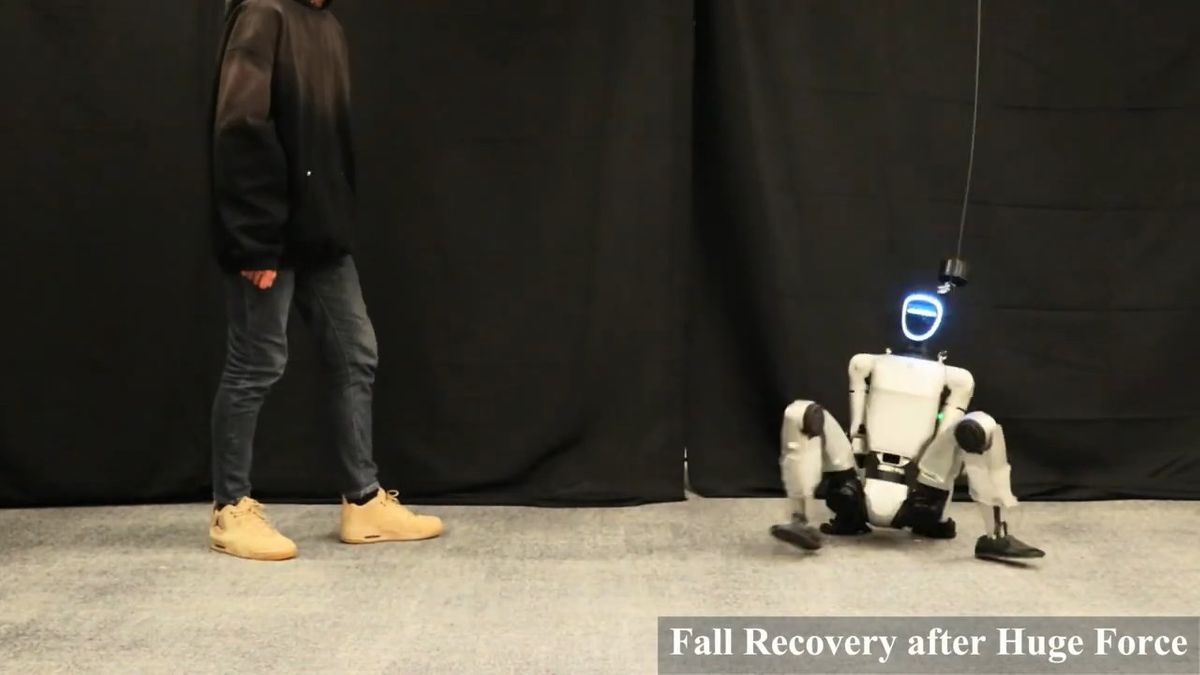
それでも最終的に、ヒューマノイドロボットは立ち上がることに成功しました。

研究チームは、「Unitree G1ヒューマノイドロボットの実験結果は、さまざまな現実世界のシナリオにおいて、スムーズで安定した堅牢(けんろう)な立ち上がり動作を示しています。今回の研究は、既存のヒューマノイドシステムに立ち上がり制御を統合する道を開くものであり、実世界での応用可能性を拡大する可能性があります」と述べました。
この記事のタイトルとURLをコピーする
ソース元はコチラ
{kind=link}
この記事は役に立ちましたか?
もし参考になりましたら、下記のボタンで教えてください。