

現実世界の様子を認識しながらタスクをこなすAI搭載ロボットの研究が進んでいますが、AI搭載ロボットには「現実世界のリアルタイムな変化に対応するのが難しい」という課題があります。新たに、リアルタイムな変化に対応できるアルゴリズム「real-time chunking(RTC)」がカリフォルニア大学バークレー校の研究チームによって開発されました。
Real-Time Action Chunking with Large Models
https://www.pi.website/research/real_time_chunking
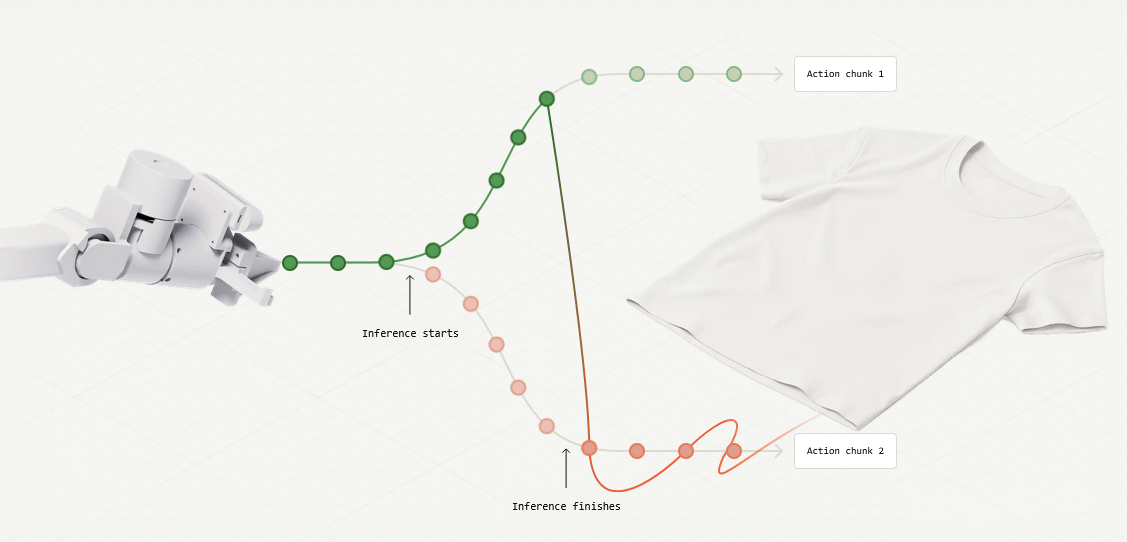
AI搭載ロボットアームに服をたたませる様子を記録した動画が以下。AIロボットは服のたたみ方を連続的に思考して実行していますが、たたみ方を思考している間に重力やロボット自体が与えた力によって服の形状が変化するため、思い通りにたたむことができません。
AI搭載ロボットに正確かつ高速な操作を実行させるには、「AIが思考している間のリアルタイムな変化」も考慮する必要があります。研究チームが開発した「real-time chunking(RTC)」はAIモデルにリアルタイムな変化への対応能力を付与できるアルゴリズムで、AIモデルの一貫した戦略を維持しつつ、新しい情報に基づいて計算内容を更新できるように設計されています。
AI搭載ロボットアームに「マッチをこすって点火して、ロウソクに火をつける」というタスクを実行させた動画が以下。左側はRTCを採用したAIモデル、右側は従来のAIモデルで動作しています。RTCを採用したAIモデルはタスクを正確にこなすことができました。
「LANケーブルを挿入する」というタスクだと、RTCを採用したAI搭載ロボットアーム(左)の方が高速にタスクを実行できました。
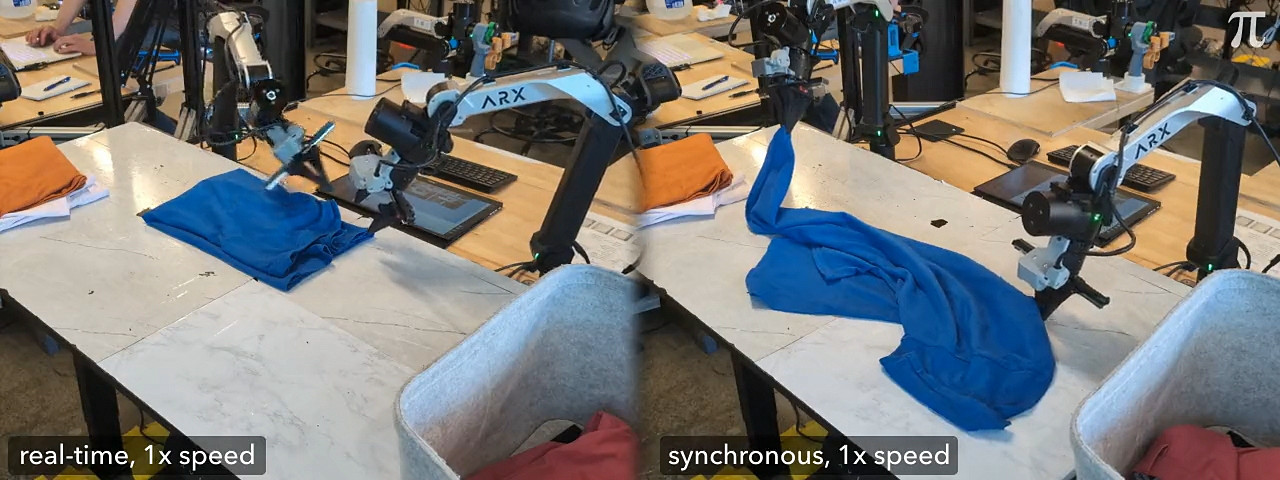
RTCを採用したAI搭載ロボットアーム(左)は服をたたむタスクも従来のAI搭載ロボットアーム(右)と比べて正確かつ高速にタスクをこなせました。
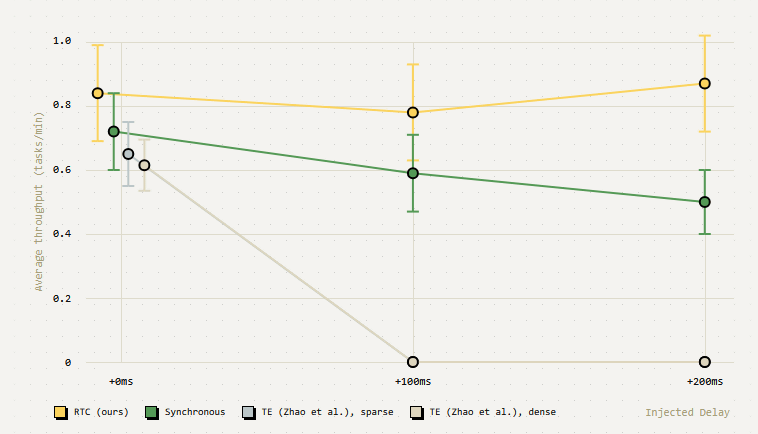
以下のグラフは横軸が「行動の計算にかかる時間」を示し、縦軸が「1分ごとにタスクをこなせる数」を示しています。RTCを採用したAI搭載ロボットアーム(黄色)は計算にかかる時間が増加してもタスク実行効率を高いまま保つことができました。
研究チームはRTCを「より深く思考するための行動停止」などにも対応できるように洗練させることを目標としています。
この記事のタイトルとURLをコピーする
・関連記事
Metaが賢いロボットを作るためのAIモデル「V-JEPA 2」をリリース、物理学的に正しい推論が可能で「考えてから行動するロボット」の開発に役立つ – GIGAZINE
30分の学習で動かせる激安219ドルのAIロボットアーム「Navrim」が登場 – GIGAZINE
ロボットアームで家事をこなす家庭用AIロボット「Maurice」が登場 – GIGAZINE
Hugging Faceがオープンソースのヒューマノイドロボット「HopeJR」とデスクトップユニット「Reachy Mini」を発表 – GIGAZINE
AI操作の自律型ドローンが国際レースで初めて人間のチャンピオンに勝利、人間と同じたった1つのカメラで飛行 – GIGAZINE
ソース元はコチラ
{kind=link}
この記事は役に立ちましたか?
もし参考になりましたら、下記のボタンで教えてください。