

探索・失敗・継続的な改善を通して行動学習する「汎用(はんよう)知能ロボット」の開発を目指す企業のPantographが、「ロボットのための幼稚園」の構想を明らかにしました。仮想上のトレーニングだけではなくロボットが現実世界のさまざまな環境に触れて学習していくことで、AIのトレーニングに利用するデータが枯渇してしまう問題を解消し、モデルの改良が続けられるようになります。
Pantograph: Building a Preschool for Robots
https://pantograph.com/blog/building-a-preschool-for-robots.html
急速に発展しているAIは、インターネット上に存在するあらゆるデータセットでトレーニングされています。一方で、ロボット工学にはこのようなデータセットが存在しないため、ゼロから作成する必要があるとPantographは述べています。
ロボットをトレーニングする場合でも、画像や動画のデータは重要です。しかし、現実世界に直接干渉するロボットは、動画から「素材の特性」や「質感」「干渉したときの感触」といったことを推測するのが難しいです。そのためPantographは「数千台の小型で安価なロボットが、触れられるもの全てに触れたり投げたりこすりつけたりしながら世界モデルを構築していく」という学習環境を構築しています。Pantographはこれを「ロボット幼稚園」と表現しています。
Pantographのロボットは小型かつ強固で、車輪ではなくキャタピラを備えているため安定性やモーター効率が向上しています。その上で、材料効率を高めて量産しやすい設計を実現しているため、データの規模が重要となるトレーニング段階のコストが安く、拡張性も高いです。
以下は、Pantographのロボットがソファーを押して動かしているところ。小型のロボットですが、アーム1本あたり約1kgと自身より重い物体を動かすことができます。

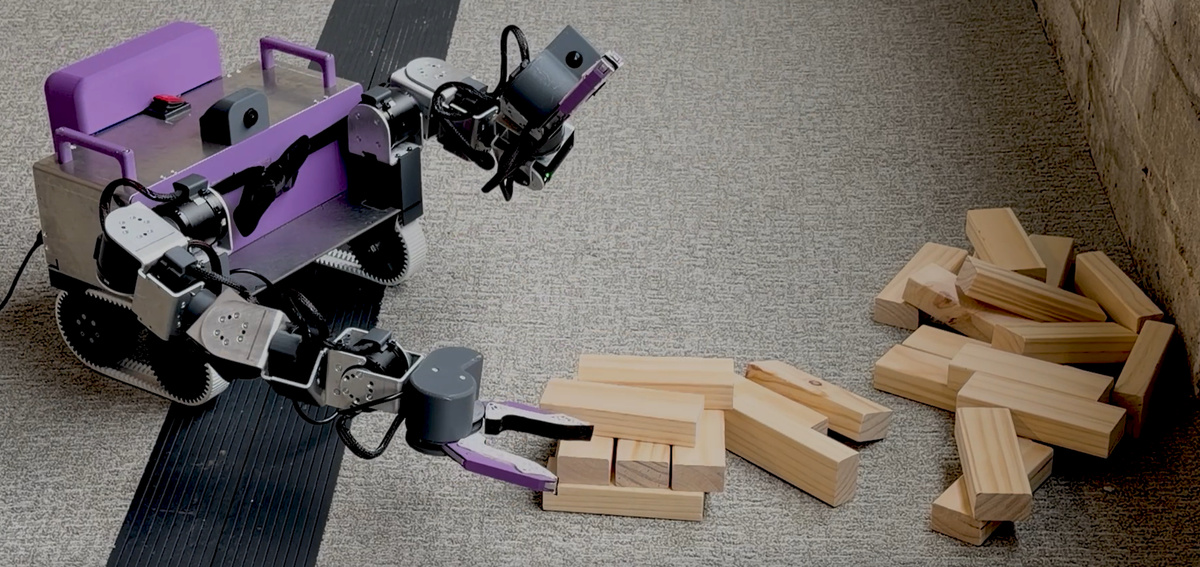
また、細かな動きの実現はロボット開発において最も難しいポイントです。Pantographのロボットは複雑な操作タスクを実行できる一方でグリッパーはシンプルに設計されています。以下は、ロボットが木のブロックを組み立てる様子。
また以下は、ロボットがUSBケーブルを挿入する様子です。丁寧で繊細な動きも可能になっています。

これらの動作は、以下のような遠隔操作によって行われています。

Pantographは「汎用知能ロボットは、仕事のやり方や人間の建築能力を根本から変えるでしょう。この技術は労働、経済、そして何かを作ることの意味といった、社会の仕組みの根幹にかかわります。私たちはロボット工学によって、人間ができることの可能性をさらに広げたいと考えています。ハードウェアコストの低減を目指しているのは、大規模なトレーニングを可能にするためだけでなく、より多くの人々がロボットを製作できるようになり、また、製作できるものを拡大したいからです」と展望を語りました。
この記事のタイトルとURLをコピーする
ソース元はコチラ
{kind=link}
この記事は役に立ちましたか?
もし参考になりましたら、下記のボタンで教えてください。