

人型ロボット(ヒューマノイド)の開発は急速な勢いで進んでおり、「人型ロボットは、あと数年で実用的になり、人間と同じ作業をこなせるようになる」と主張する企業もあります。しかし、ロボット工学の第一人者でルンバの開発企業「iRobot」の共同創設社でもあるロドニー・ブルックス氏は「人型ロボットの開発にはまだまだ時間がかかる」と主張し、その根拠を自身のブログで解説しています。
Why Today’s Humanoids Won’t Learn Dexterity – Rodney Brooks
https://rodneybrooks.com/why-todays-humanoids-wont-learn-dexterity/
ブルックス氏はロボット開発アーキテクチャーの1つである「Subsumption Architecture(包摂アーキテクチャー)」の提唱者として有名なロボット工学の第一人者で、iRobotやRethink Roboticsといったロボット企業の共同創設社でもあります。Rethink Roboticsのロボット「Sawyer(左)」と「Baxter(右)」とともに写るブルックス氏の写真が以下。
そんなブルック氏は「あと数年で人型ロボットが人間の代わりに仕事をするようになる」という言説に懐疑的な見解を示しており、「人型ロボットの実用化には10年以上の時間がかかる」と主張しています。
テスラなどの人型ロボットの開発企業は「人間の動作を記録した動画データなどをもとに、ロボットを動かすAIを開発する」というアプローチを採用しています。しかし、ブルック氏によるとこのアプローチは非常に困難なものとのこと。その大きな理由が「触覚を正確にデータ化する方法が確立されていない」という点です。
人間が精密な動作を実現できている大きな要因が「触覚によるフィードバック」です。触覚の重要性は以下の「通常状態と触覚制限状態でマッチの火をつける」という実験を記録した2本の動画を再生するとよく分かります。まず、1本目の動画では通常の状態で「片手で卓上のマッチ棒を手に取り、卓上に置いたマッチ箱にこすりつけて点火する」という操作を実行しています。

そして、2本目の動画では麻酔で指の感覚を制限した状態で同じ操作を実行してます。動画を再生すると、触覚によるフィードバックが失われたことであらゆる動画が難しくなっていることが分かります。テスラなどの人型ロボットの開発企業は「人間の動作を記録した動画をもとに人型ロボット用のAIを開発する」というアプローチを採用していますが、人間レベルの精密動作を実現するには単純に「人の動き方」を学ぶだけでなく「触覚に対する反応」も学習する必要があるというわけです。

すでに実用化されている画像認識モデルや大規模言語モデルは「画像」や「文章」といった情報を学習データとして活用しています。画像認識モデルの開発には「人間の脳が画像を認識する仕組みを模したシステム」が用いられ、大規模言語モデルの開発には「トークン化などの人間の脳が言語を認識する仕組みを模したシステム」が用いられているのですが、触覚に関する同じようなシステムは確立されていません。
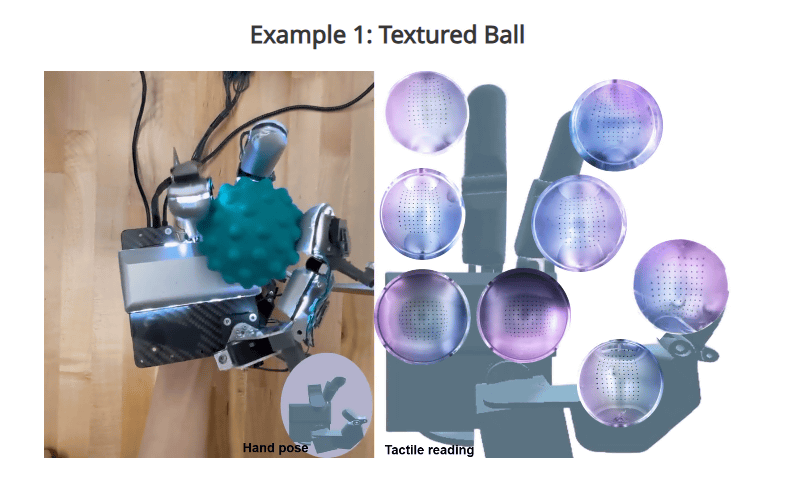
ただし、触覚に関する研究がまったく進んでいないというわけではありません。例えばマサチューセッツ工科大学を中心とする研究チームは手に装着して各種動作を実行することで手指の動きや触覚を記録できる「DEXOP」というデバイスを開発しています。
また、人型ロボットには介護などの人間と接触する作業も求められますが、現時点では安全性に問題があります。歩行に必要なエネルギーはロボットのサイズによって異なり、人間と同等サイズの人型ロボットが誤って人間を蹴ってしまった場合、大きな事故につながる可能性があります。ブルック氏は「『空飛ぶクルマ』は構想段階では『車道を走ることも空を飛ぶこともできるクルマ』が想定されていたが、現時点の『空飛ぶクルマ』は地上を走行できない垂直離陸機を指す言葉になってしまった」という例を挙げつつ、「人型ロボットも人間に似た脚ではなく、車輪を搭載するようになるだろう」と指摘しています。
なお、ブルック氏は「大手テクノロジー企業やベンチャーキャピタルは人型ロボットの開発に大金を投じているが、その投資額の20%を大学の研究者たちに与えればもっと早く目標に近づけるだろう」とも述べています。
この記事のタイトルとURLをコピーする
ソース元はコチラ
{kind=link}
この記事は役に立ちましたか?
もし参考になりましたら、下記のボタンで教えてください。