
Googleがロボット向けのVLAモデル「Gemini Robotics On-Device」を2025年6月24日に発表しました。Gemini Robotics On-DeviceはローカルのGPUを用いて処理可能な軽量さを特徴としており、既存のローカルVLAモデルと比べて高い性能を備えています。
Gemini Robotics On-Device brings AI to local robotic devices – Google DeepMind
https://deepmind.google/discover/blog/gemini-robotics-on-device-brings-ai-to-local-robotic-devices/
Excited to release Gemini Robotics On-Device and bunch of goodies today
🍬 on-device VLA that you can run on a GPU
🍬 open-source MuJoCo sim (& benchmark) for bimanual dexterity
🍬 broadening access to these models to academics and developershttps://t.co/mSjXTLuOeu— Dhruv Shah @ RSS (@shahdhruv_) June 24, 2025
GoogleはGemini 2.0をベースに「動作を出力する機能」を追加したVLAモデル「Gemini Robotics」を2025年3月にリリースしました。今回発表されたGemini Robotics On-DeviceはGemini Roboticsをローカルで動作するように最適化したモデルで、2本腕のロボットを最小限の計算リソースで操作できるように設計されています。
Gemini Robotics On-Deviceはインターネット接続不要で実行できるため、低遅延が求められるタスクで威力を発揮します。また、ローカルで動作するほどの小型モデルながら「自然言語での指示を理解してバッグのジッパーを開ける」といった高精度な動作が可能です。

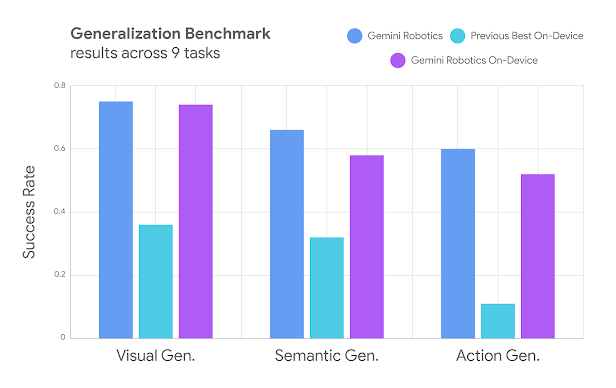
「Gemini Robotics(青)」「既存の最高性能のオンデバイスモデル(青緑)」「Gemini Robotics On-Device(紫)」のベンチマーク結果を並べたグラフが以下。Gemini Robotics On-Deviceは既存のオンデバイスモデルを大きく超える性能を示しました。
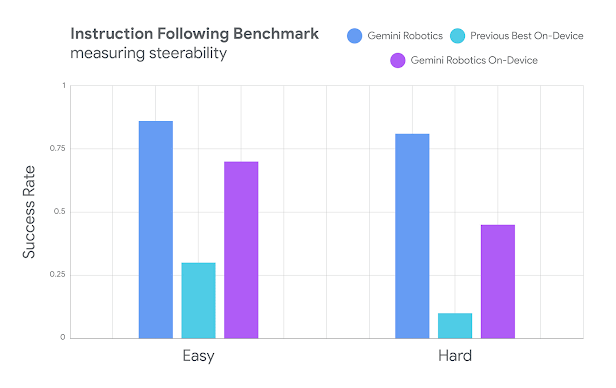
以下のグラフは、「簡単なタスク(Easy)」と「難しいタスク(Hard)」の達成率を比較したものです。Gemini Robotics On-Deviceは既存モデルよりもタスク達成率が圧倒的に高いことが分かります。
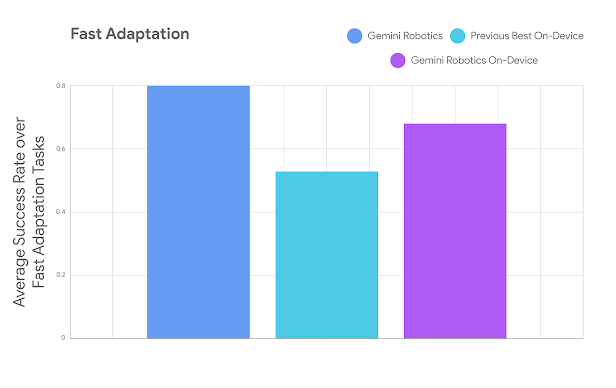
また、Gemini Robotics On-Deviceはモデルの微調整にも対応しており、50~100回のデモンストレーションだけで新たな状況に適応することができます。「Gemini Robotics(青)」「既存の最高性能のオンデバイスモデル(青緑)」「Gemini Robotics On-Device(紫)」の微調整を伴うタスクの達成率を比較したグラフは以下の通り。
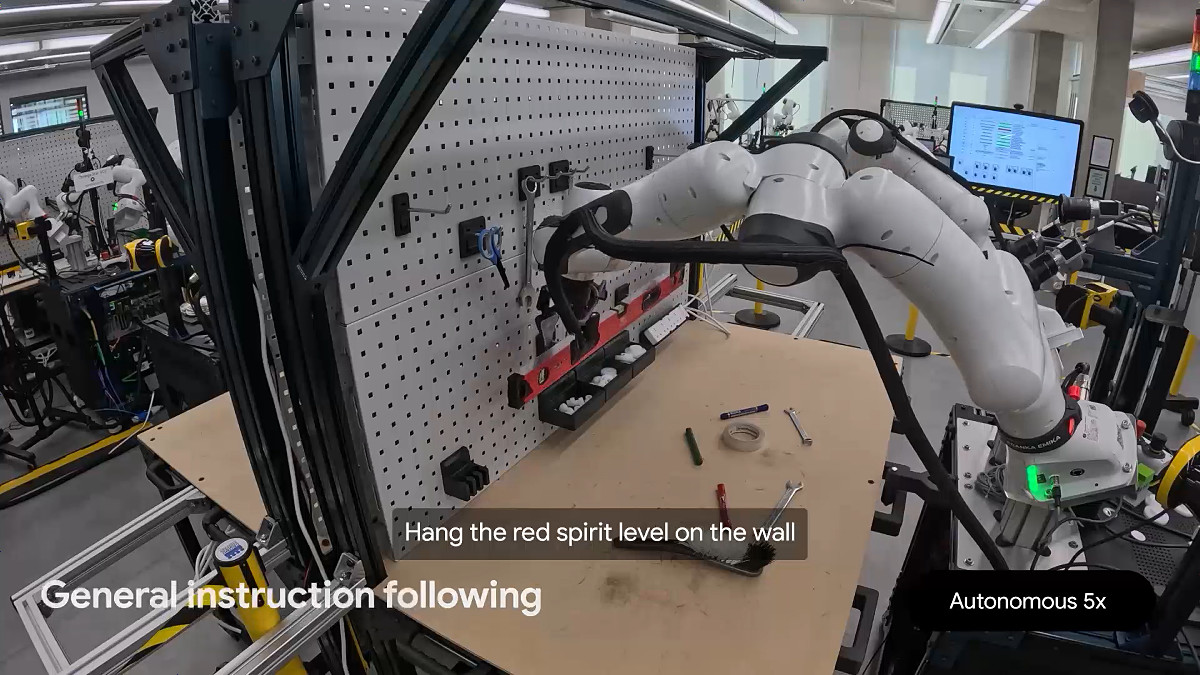
Gemini Robotics On-Deviceは当初はGoogleのロボットアーム「ALOHA」向けに設計されていましたが、「Franka Research 3」や「Apollo」といった他社製モデルでも高い性能を発揮できるようになりました。以下の画像はGemini Robotics On-Deviceを搭載したGemini Robotics On-Deviceが「赤い水準器を壁にかけて」というタスクをこなす様子です。
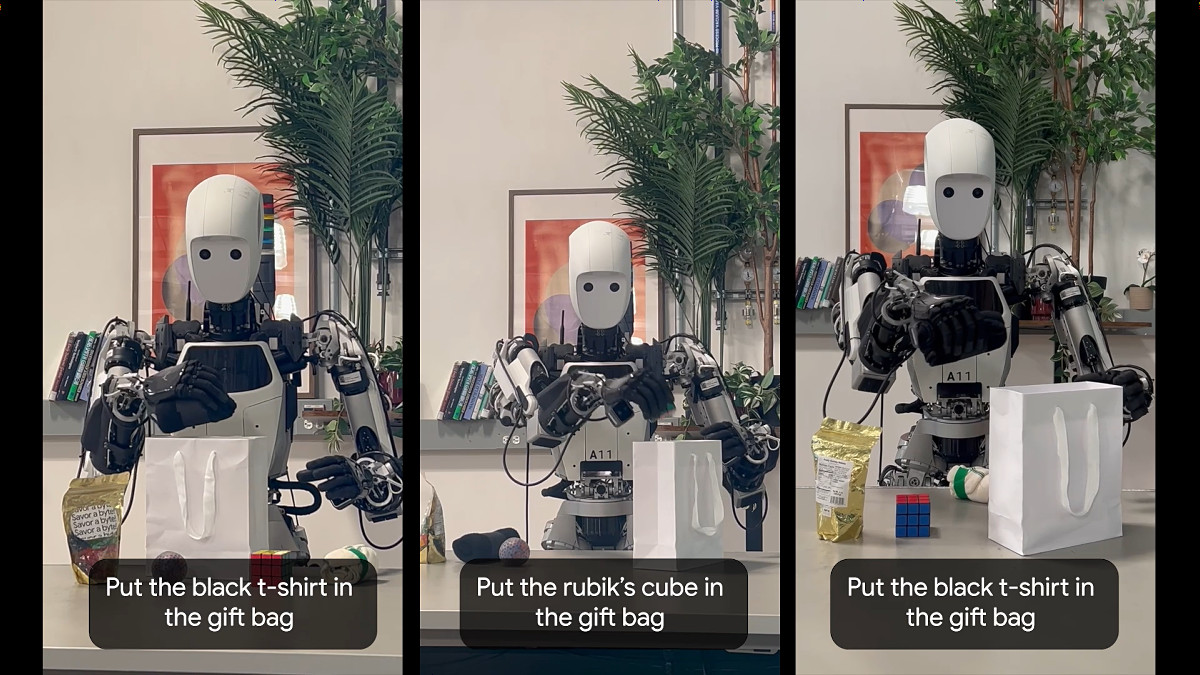
Gemini Robotics On-Deviceを搭載したApolloは「テーブルに並んだ複数の物体の中から指示通りの物体を選択して袋に詰める」という動作をローカル処理だけで実現しました。
GoogleはGemini Robotics On-Deviceの開発キットを一部の開発者向けに公開しており、興味を持った開発者に対してウェイトリストへの登録を呼びかけています。
We’re also launching the Gemini Robotics software development kit (SDK) to help developers fine-tune the model for their own applications, including by testing it in the MuJoCo physics simulator. 🌐 pic.twitter.com/w8uOFSnCXK
— Google DeepMind (@GoogleDeepMind) June 24, 2025
この記事のタイトルとURLをコピーする
{kind=link}
この記事は役に立ちましたか?
もし参考になりましたら、下記のボタンで教えてください。